
Haptic technology is growing viral in modern markets as people are pursuing the virtual world, where humans are fully experiencing the sense of audio, visual and tactile. Haptic feedback uses tailored vibration or actuated movement to offer users the tactile feedback or information by means of force, motion, vibration, material texture, etc. With the haptic technology penetration, capacitive touch screens are generating evolutionary change in our lives and it incorporates the haptic technology to complete our 3D world. It vitally improves the driver’s safety as analyzed by TMR, showing haptic technology is great for drivers to avoid distraction via tactile feedback when they are focusing on controlling the automotive infotainment system, GPS or music.
Haptic feedback solutions are typically made up of a haptic driver, processor, touch sensor and haptic actuator/motor. Touch sensors detects users’ phyiscal press from the touch screen, and quickly pass the signal to the haptic processor along with which area is pressed; the processor receives and processes the signals and makes the device react. The haptic driver synchronously detects the touch signals to drive the haptic actuators or motors according to the touch signals’ order of which haptic effect should be triggered. The haptic actuators will then be driven with a range of signals to accelerate or decelerate, start or settle them, by converting electrical energy into mechanical energy. The haptic feedback quality really depends on the actuator function. There are 4 typical types of haptic actuators including Eccentric Rotation Mass (ERM), Linear Resonant Actuator (LRA), Piezo and Solenoid. Some of them are either too expensive or only have a handful of uses. Our focus is on LRA and ERM that both work reliably and are cost effective in haptic feedback utilization.
Before capactive touch screens emerged, vibration motors used in pagers and phones were for vibration alerting, it was a much older and simpler tactile form to grab users’ attention.Then the capacitive touch screens engaged in the haptic technology, and has been making the haptic feedback show its extraordinary talents. It allows adding high quality and complexity to the haptic feedback in the basis of the multiple-pattern driver, more compatible and customizable haptic motors, and wide range of experience in how to combine all the components in depth. For the haptic motors, from ERMs to LRAs, to further taliored LRAs, the haptic feedback is getting more crisp, has a wider band, is more audibly quiet and provides a richer user experience. Smartphones and tracker pads are increasingly bringing in touch screen haptics, where especially the LRA is used to mimic the touch feeling of a physical button when the user presses the screen.
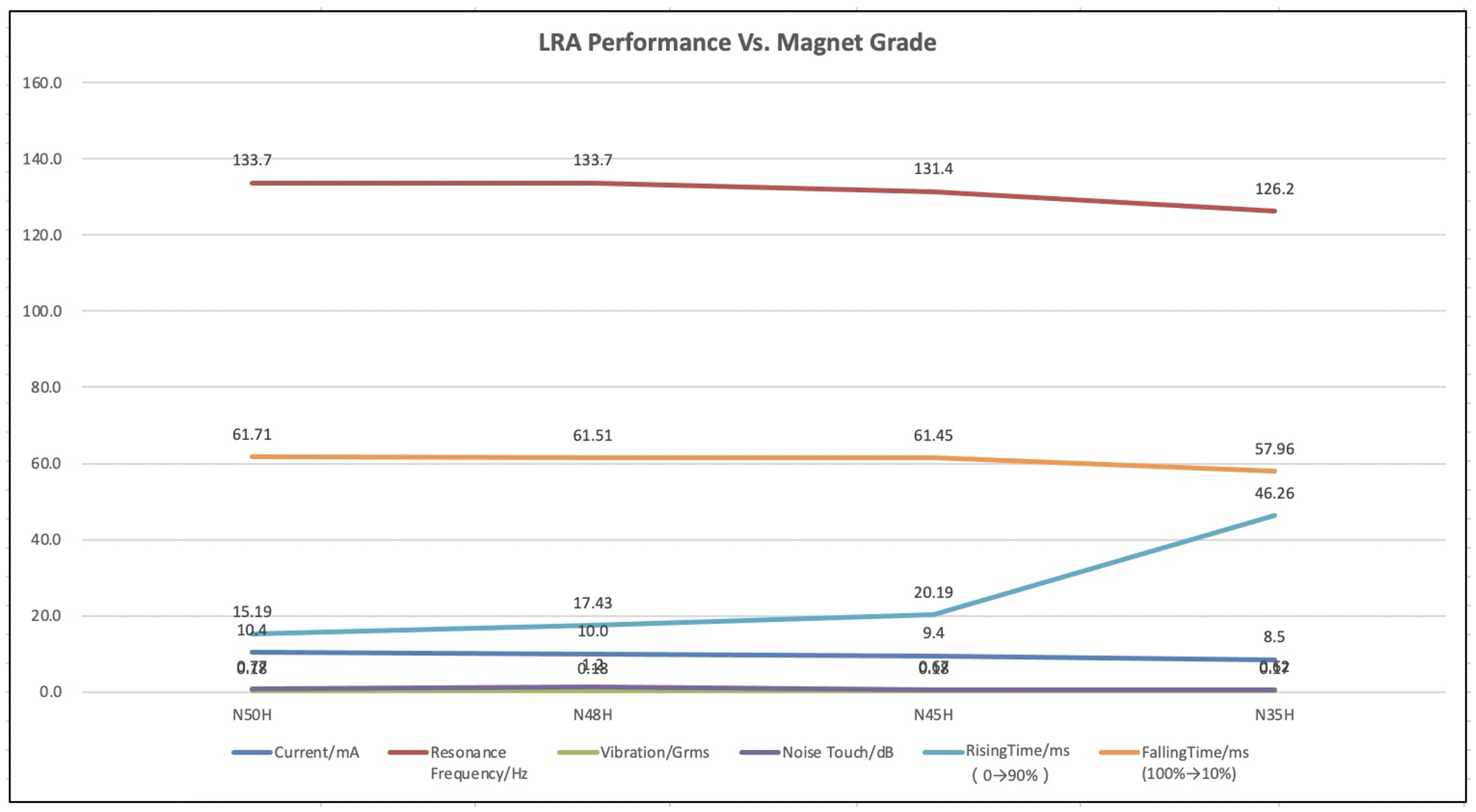
As more heavy-duty haptic drivers stand out, the LRAs need to be optimized to receive and react to the complicated signals from drivers. It is critical to precisely tailor the LRA vibration characteristics through controlling and tuning the multiple and critical factors related, including the relationship among resonant frequency, electromagnetic field, vibrator mass, damper element and vibration screen size and mass. There is a Z-axis LRA with 21*7.5*3.5mm form factor. A 15.8*3.5*2.0mm main magnet and a pair of 4*1.17*0.45mm assistant magnets are assembled in the enclosure, the LRA performance varies among different assistant magnet fields N35H, N45H, N48H and N50H maintaining the same main magnet, see the below diagram:
Resonant Frequency tends to be lower as assistant magnet field weakens
Rising has latency as less magnetic force responds to the coil field
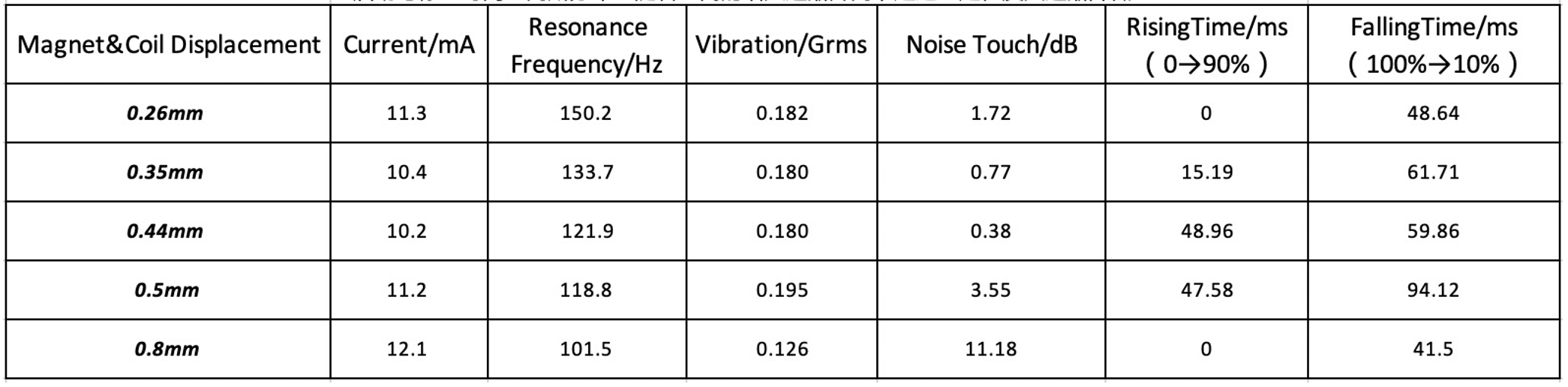
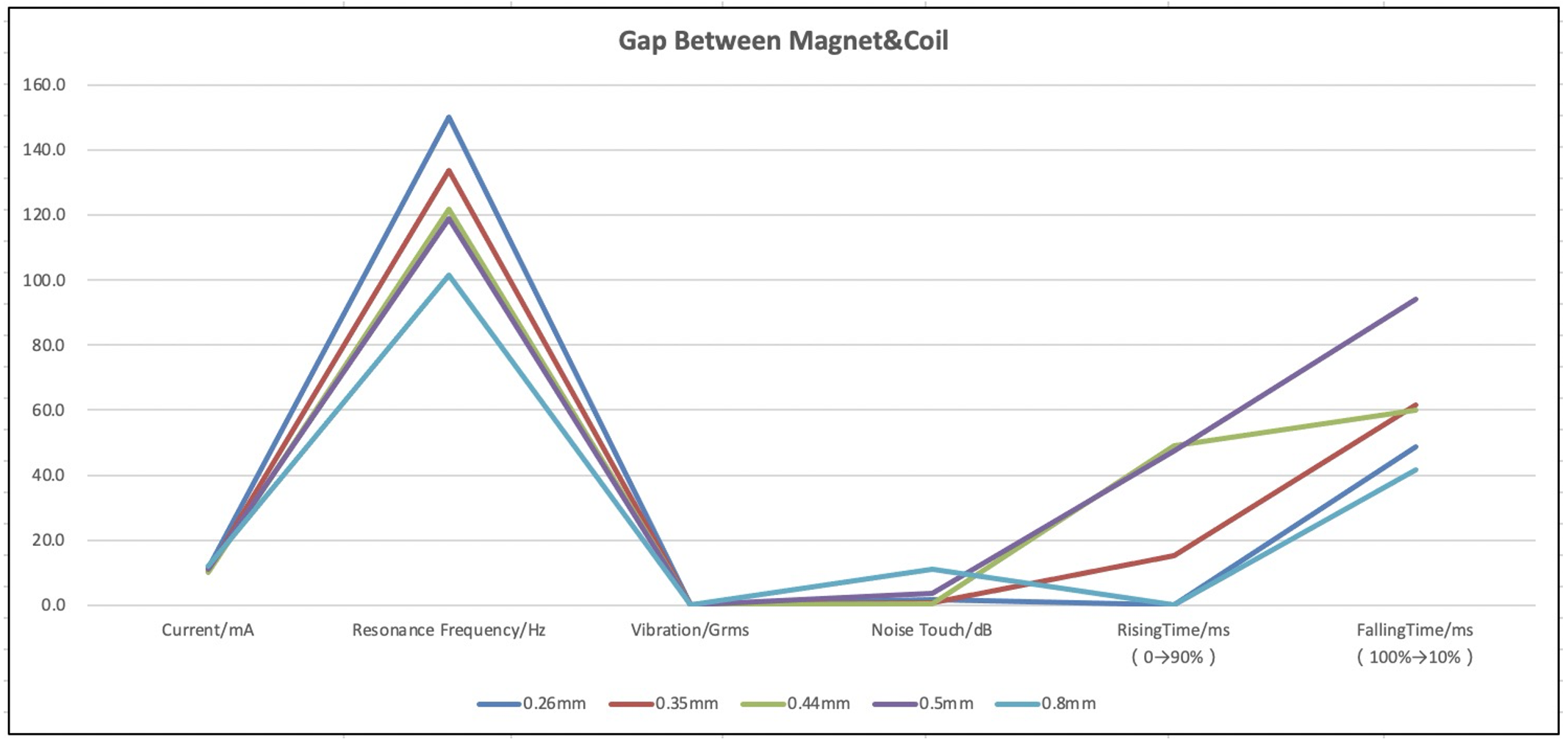
Similarly, this LRA’s performacne varies with the main magnet and the coil displacement that is changing the magnetic field reaction:
Resonant Frequency tends to be lower when main magnet is further away from the coil field in vibration direction, indicating larger amplitude is operating
Acceleration maintains a certain amount until the displacement is beyond a limit
Noise is louder as the potential mechanical collision appears between moving mass, and spring or enclosure
Rising and Falling time perform symmetric characteristics and it depends on the displacement point between the coil and the magnet
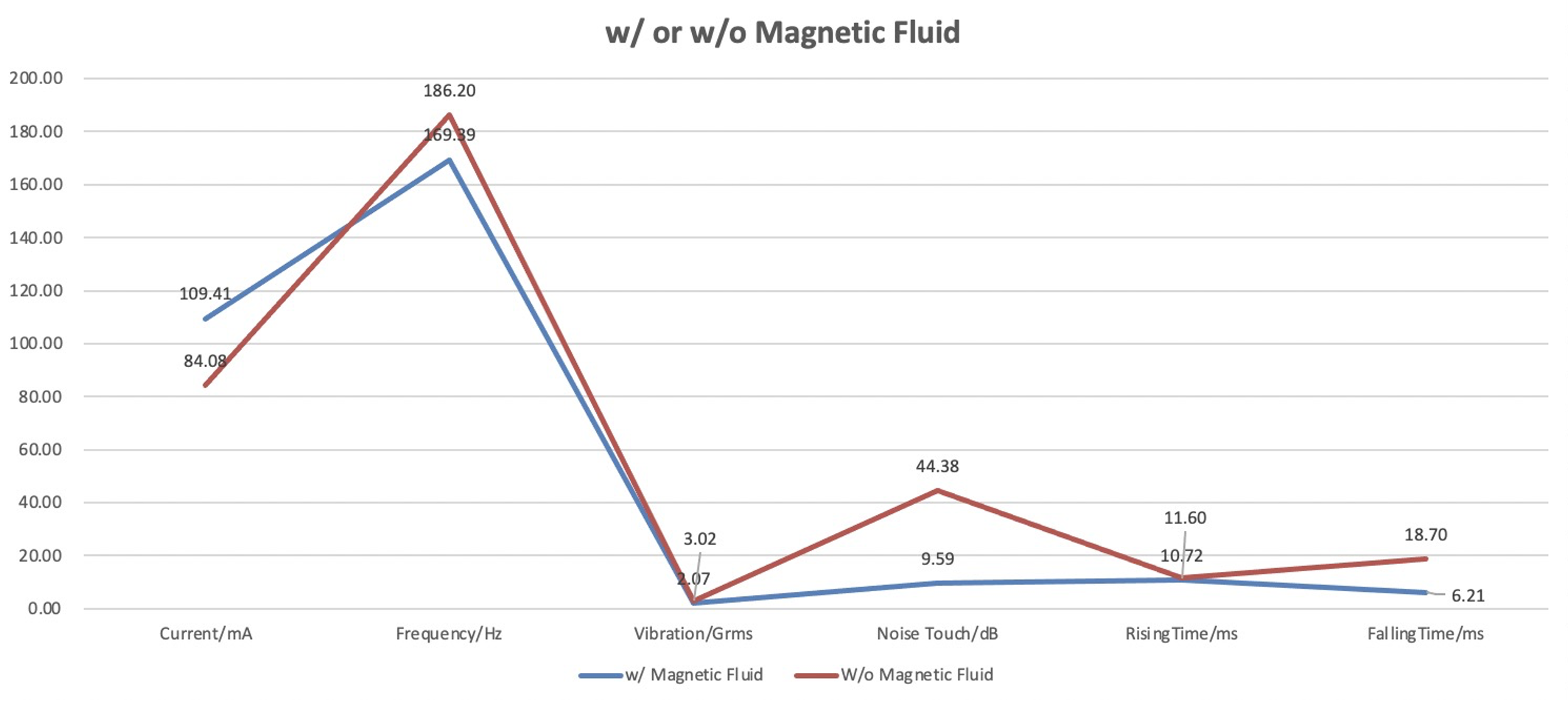
In another Z-axis LRA1040, with diameter 10*4mm coin form, we studied how the magnetic fluid effects the motor performance as a damping system. With the magnetic fluid, the work current increases 25mA, resonant frequency drops down ~17Hz along with deceleraton of ~0.1Grms due to merely shorter vibration amplitude being performed , and it is beneficial to degrade the noise and reduce falling latency. In the LRA system, magnetic fluid is one of the solutions to stabilize and improve the vibration performance, damping foam and damping material can be applied as well.
The product designer and the user are looking for simultaneously detecting a specific haptic feedback experience under a given signal input, and short burst is released with super low-latency, also the user is able to distinguish the pattern from complicated modes.Therefore, advanced haptic technology should allows the user to interact with the devices based on diverse scenarios. Advanced haptic motors must be tailored to adapt to the heavy duty haptic driver, for instance, smartphone users need to receive and differentiate tactile feedback, an incoming notification with medium vibration once and a prior notification with enhanced vibration twice, experience the virtual exchange when pressing a number or key, scroll/scrub the article bottom-up and up-down with fingertip pressure, drawing a thick or thin line with strong and slight pencil tip, and lower-latency response. The look-forward haptic technology deeply depends on tailoring advanced haptic motors and haptic driver, that is definitely on aware of the expectations.
Architecture designers stick to competitive special volumes, so components are tailored to be encapsulated in a smaller space. There is an ultra-thin trend in haptics appplication. The haptic motor is specified to output higher power with smaller body, shrinking the motor size is a necessary direction, the motor is tailored to be enclosed or built-in the base.
Learn more about Haptic motor, contact Quadrant.